PLEASE GIVE ME AN EXAMPLE
Home
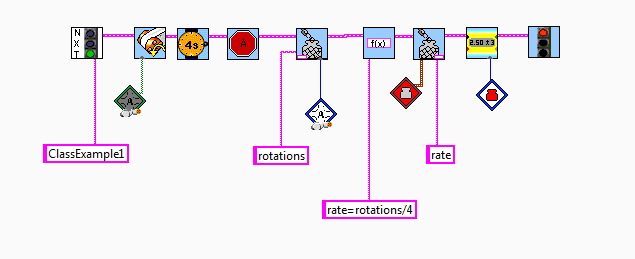
Example sets the rotation sensor for motor A to 0. Moves the robot forward for 4 seconds and stops. There is then a variable named "rotations" that is set to the rotation value of the sensor. A function is then evaluated that divides the rotations by the number of seconds the robot moved. This function called rate is now dropped into the red container. The output of the red container is then displayed on the screen.