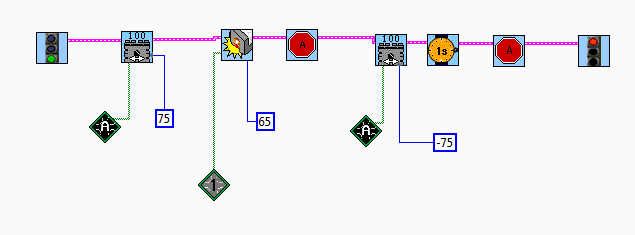
Light Sensors
These sensors respond to the amount of light that enters them. They emit a small amount of light that bounces off an object and back into the sensor. Dark colors will absorb the light and bright, reflective colors will bounce a lot of light back into the sensor. The sensor can read a value from 0 to 100. They can also be used to detect ambient light in a room...so there may be more light near a window and less under a desk. (The Mindstorm sensors do not detect ambient light.)
These can be used to follow lines (black lines on a white poster board, for example).
.
Light Sensor