Rotation Sensors
The touch sensor gives a return of either 0 for not touched or 1 for touched. You can program this to be the opposite if you want the sensor to start depressed.
No touch

Touch.

Rotation Sensors The touch sensor gives a return of either 0 for not touched or 1 for touched. You can program this to be the opposite if you want the sensor to start depressed. |
|||
No touch |
|
Touch. |
|
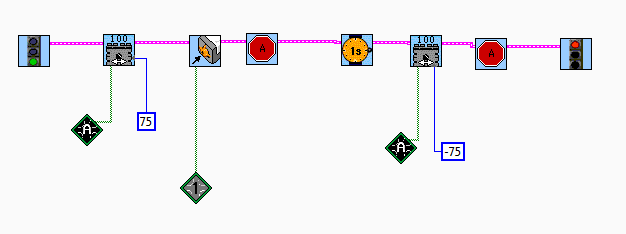
The example below will have the robot go forward until the touch sensor is pressed. It will then stop for a second and reverse. |
|
|
|